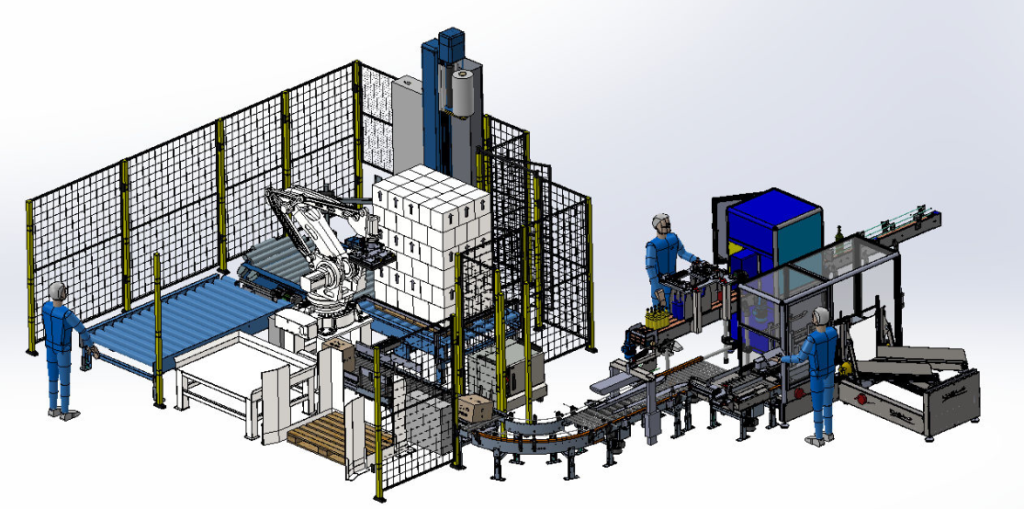
Nos ocupamos de diseñar y/o reconfigurar líneas completas de producción (embotellado, packaging, etc) realizando la integración de equipos como llenadoras, estuchadoras, etiquetadoras, encajadoras, paletizado, etc.
Integración de equipos y máquinas de terceros
Modificamos los equipos, añadimos transportadores, realizamos la instalación de suministros (energía eléctrica, aire comprimido, vacio…), si es necesario un equipo/máquina especial lo diseñamos, construimos e integramos (volteadores, paletizadores, etc).
Modificamos los equipos, añadimos transportadores, realizamos la instalación de suministros (energía eléctrica, aire comprimido, vacio…), si es necesario un equipo/máquina especial lo diseñamos, construimos e integramos (volteadores, paletizadores, etc).
Diseño, construcción y puesta en marcha de máquinas y equipos especiales. Máquinas para medida y control de calidad, procesado (manufacturing), packaging.
ALGUNOS EJEMPLOS DE OPERACIONES EN LINEA:
Lavado, cepillado.
Formadoras de cajas.
Volteadores de piezas, cajas, bandejas.
Encajadoras.
Pulmón de acumulación.
ALGUNOS EJEMPLOS DE CONTROL DE CALIDAD EN LINEA:
Nivel de llenado botellas, control de capsula y tapón.
Supervisión del etiquetado 360o y serialización.
Testadoras peso robotizada
Testadora de peso de dosis aerosoles.
Testadora de fatiga para piezas del automóvil.
Control dimensional de piezas mediante visión artificial.
Control de aspecto y defectos cosméticos (rayadura, golpes, poros, etc.).
ALGUNOS EJEMPLOS DE OPERACIONES EN LINEA:
Lavado, cepillado.
Formadoras de cajas.
Volteadores de piezas, cajas, bandejas.
Encajadoras.
Pulmón de acumulación.
ALGUNOS EJEMPLOS DE CONTROL DE CALIDAD EN LINEA:
Nivel de llenado botellas, control de capsula y tapón.
Supervisión del etiquetado 360o y serialización.
Testadoras peso robotizada
Testadora de peso de dosis aerosoles.
Testadora de fatiga para piezas del automóvil.
Control dimensional de piezas mediante visión artificial.
Control de aspecto y defectos cosméticos (rayadura, golpes, poros, etc.
Manipulación mediante robots y robots colaborativos
Diseñamos y construimos completamente la célula robotizada adecuada a las tareas a realizar. Ya sea mediante robot convencional (Cartesiano, Scara o Antropomorfo) o mediante robot colaborativo.
Paletizado y despaletizado.
Carga de piezas en línea, Pick and Place, Bin Picking.